
-

3D高斯泼溅技术发展及其在具身智能领域的应用综述
3D高斯泼溅(3D Gaussian Splatting, 3DGS)作为一种新型可微分三维场景表⽰技术 ,凭借高保真渲染、实时推理、端到端可微等优势 ,突破了传统网格模型、点云、神经辐射场( NeRF) 的技术瓶颈 ,已成为三维视觉、智能仿真与具身智能领域的研究热点。
넶0 2026-07-05 -

TsingtaoAI签约具身智能养老项目,让“冷科技”化身银发族“热陪护”
2026年6月初,宁波 —— 随着全球人口老龄化加剧,如何利用前沿人工智能解决居家养老的痛点,一直是从业者探索的方向。近日,TsingtaoAI与华南某养老服务机构正式签署一项基于人形机器人的养老护理系统开发合同。目前已收到对方预付款并进入开发环节,项目的核心开发周期为80个自然日。该项目将以宇树R1 Edu 标准版-ZL为硬件载体,搭载多款传感器,依托TsingtaoAI在具身智能领域的技术底座,为真实养老场景打造一位具备“看、听、走、想”能力的全天候智能陪护助手。
넶0 2026-07-05 -

脑控机器人项目交付|用意念指挥机器人,情绪交互与抓取功能全面实现
随着脑机接口(BCI)技术的快速发展,将人类大脑信号直接转化为机器指令已成为现实。本项目以“大咖X7 Edu”机器人为主体开发平台,搭配X-BCI 4通道脑电采集设备,旨在开发一款具备情绪感知能力和物品抓取能力的智能机器人系统。项目于5月初正式启动,至今已完成交付,全程采用并行开发策略,并充分借助TsingtaoAI本地机器人实验室资源,有效降低了开发成本,加速了调试进程。
넶0 2026-07-05 -

TsingtaoAI获评北京市创新型中小企业
近日,北京市经济和信息化局公布了最新一批“创新型中小企业”名单。凭借在具身智能底层数据合成、技能开发平台领域的自主创新能力与深度的商业落地成果,TsingtaoAI正式入选该名单。
넶0 2026-07-05 -

打破工业具身智能“落地贵”瓶颈,TsingtaoAI成功挂牌宁波股交中心
2026年5月14日,工业领域具身智能前沿开拓者——TsingtaoAI迎来重要发展节点,正式在宁波股权交易中心青创项目挂牌展示。这一进展不仅彰显了资本市场与地方政府对智能化前沿赛道的高度认可,更标志着TsingtaoAI“软硬一体工业具身PoC底座”在商业化落地上面向市场迈出了坚实一步。
넶0 2026-07-05 -
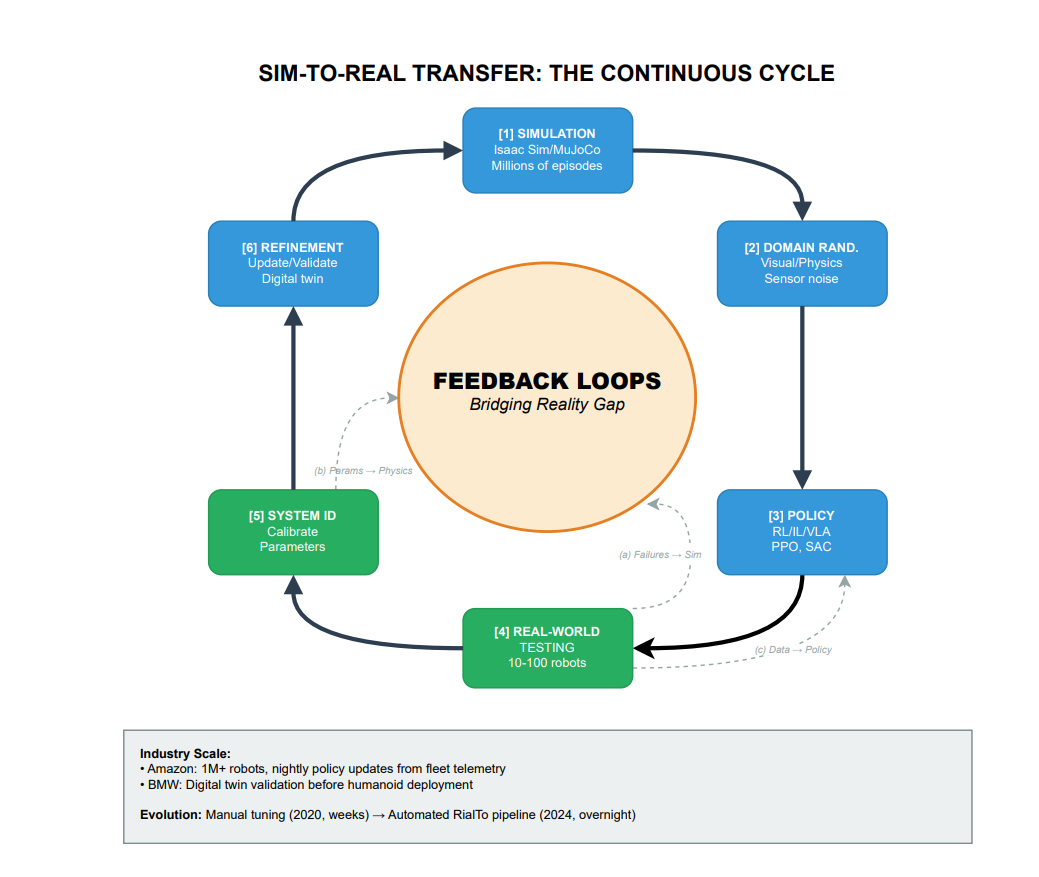
跨越仿真鸿沟:2026年Physical AI规模化落地关键技术突破
2023 至 2025 年间,工业界迎来了前所未有的应用浪潮:low-code 部署平台、面向工业抓取的 foundation models,以及在物流、制造和城市出行领域实现商业化规模部署的机器人车队。仅 2024 年一年,Physical AI 公司便吸引了超过 70 亿美元的风险投资,多笔巨额融资轮次表明,投资者将具身 foundation models 视为一代人的重大机遇。
넶0 2026-07-05







